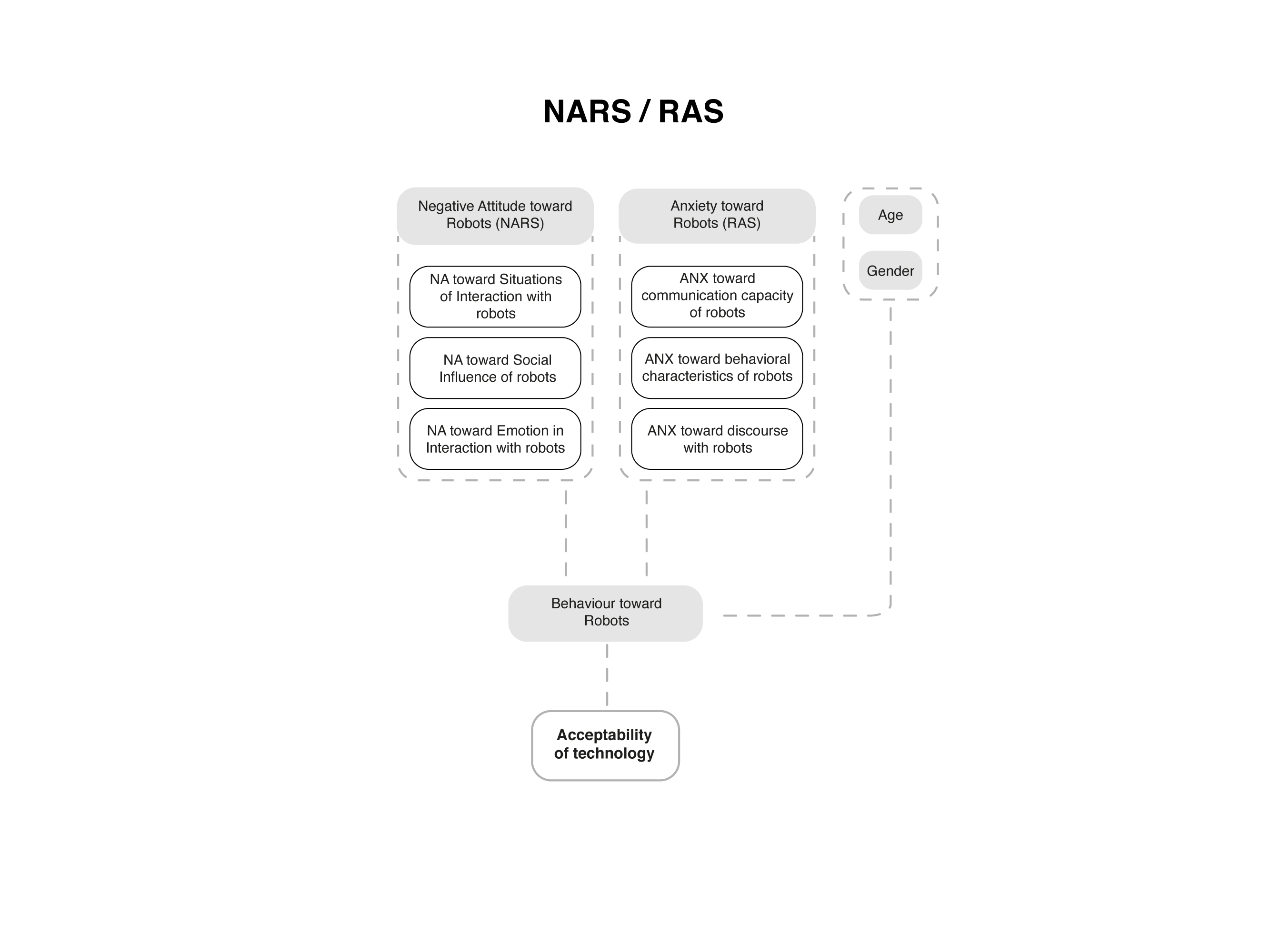
The NARS (Negative Attitude Toward Robots Scale) was developed to analyze the level of negative attitudes of humans towards robots, which can affect the quality of interaction, experience and therefore acceptability. Similarly, the RAS (Robot Anxiety Scale) was developed by Nomura et al., (2008) to analyze the anxiety felt by users towards robots, as a determining factor for the behavior of the individual and therefore the acceptability. These scales, whose architecture is composed of several variables determining acceptability, are used in order to improve human-robot interaction and make it more effective.
HCD
HRI
Using HCD methods, it is possible to identify user thoughts, expectations, anxieties or fears before interaction with robots in order to calibrate design requirements to user needs (Figure 8). The most effective HCD methods to investigate the dimensions of NARS and RAS are: Personas and questionnaire. Below is the architecture of the NARS and RAS scales and the relationships between their constructs that determine the acceptability of the technology. In evidence are the influential variables for acceptability that can be analyzed in advance through the HCD methods identified in the upper part of the scheme (personas, questionnaire).